Идея метода гармонической линеаризации принадлежит Н.М. Крылову и Н.Н. Боголюбову и базируется на замене нелинейного элемента системы линейным звеном, параметры которого определяются при гармоническом входном воздействии из условия равенства амплитуд первых гармоник на выходе нелинейного элемента и эквивалентного ему линейного звена. Данный метод может быть использован в том случае, когда линейная часть системы является низкочастотным фильтром, т.е. отфильтровывает все возникающие на выходе нелинейного элемента гармонические составляющие, кроме первой гармоники.
Коэффициенты гармонической линеаризации и эквивалентные комплексные коэффициенты передачи нелинейных элементов . В нелинейной системе (рис. 2.1) параметры линейной части и нелинейного элемента выбирают таким образом, чтобы существовали симметричные периодические колебания с частотой w.
В основе метода гармонической линеаризации нелинейностей (рис. 2.10), описываемых уравнением
y н = F(x), (2.17)
лежит предположение, что на вход нелинейного элемента подается гармоническое воздействие с частотой w и амплитудой a , т.е.
x = a sin y, где y = wt, (2.18)
а из всего спектра выходного сигнала выделяется только первая гармоника
y н 1 = a н 1 sin(y + y н 1), (2.19)
где a н 1 - амплитуда а y н 1 - фазовый сдвиг;
при этом высшие гармоники отбрасываются и устанавливается связь между первой гармоникой выходного сигнала и входным гармоническим воздействием нелинейного элемента.
Рис. 2.10. Характеристики нелинейного элемента
В случае нечувствительности нелинейной системы к высшим гармоникам нелинейный элемент может быть в первом приближении заменен некоторым элементом с эквивалентным коэффициентом передачи, который определяет первую гармонику периодических колебаний на выходе в зависимости от частоты и амплитуды синусоидальных колебаний на входе.
Для нелинейных элементов с характеристикой (2.17) в результате разложения периодической функции F(x) в ряд Фурье при синусоидальных колебаниях на входе (2.18) получим выражение для первой гармоники сигнала на выходе
y н 1 = b 1F siny + a 1F cosy, (2.20)
где b 1F , a 1F - коэффициенты разложения в ряд Фурье, определяющие амплитуды соответственно синфазной и квадратурной составляющих первой гармоники, которые определяются по формулам:
px = a w cos y, где p = d/dt,
то связь между первой гармоникой периодических колебаний на выходе нелинейного элемента и синусоидальными колебаниями на его входе можно записать в виде
y н 1 = x, (2.21)
где q = b 1F /a , q¢ = a 1F /a .
Последнее уравнение называется уравнением гармонической линеаризации , а коэффициенты q и q¢ - коэффициентами гармонической линеаризации .
Таким образом, нелинейный элемент при воздействии гармонического сигнала с точностью до высших гармоник описывается уравнением (2.21), которое является линейным. Это уравнение нелинейного элемента отличается от уравнения линейного звена тем, что его коэффициенты q и q¢ изменяются при изменении амплитуды a и частоты w колебаний на входе. Именно в этом заключается принципиальное отличие гармонической линеаризации от обычной, коэффициенты которой не зависят от входного сигнала, а определяются только видом характеристики нелинейного элемента.
Для различных видов нелинейных характеристик коэффициенты гармонической линеаризации сведены в таблицу . В общем случае коэффициенты гармонической линеаризации q(a , w) и q¢(a , w) зависят от амплитуды a и частоты w колебаний на входе нелинейного элемента. Однако, для статических нелинейностей эти коэффициенты q(a ) и q¢(a ) являются функцией только амплитуды a входного гармонического сигнала, а для статических однозначных нелинейностей коэффициент q¢(a ) = 0.
Подвергнув уравнение (2.21) преобразованию по Лапласу при нулевых начальных условиях с последующей заменой оператора s на jw (s = jw), получим эквивалентный комплексный коэффициент передачи нелинейного элемента
W Э (jw, a ) = q + jq¢ = A Э (w, a ) e j y э (w , a ) , (2.22)
где модуль и аргумент эквивалентного комплексного коэффициента передачи связаны с коэффициентами гармонической линеаризации выражениями
A Э (w, a ) = mod W Э (jw, a ) =
y Э (w, a ) = arg W Э (jw, A) = arctg.
Эквивалентный комплексный коэффициент передачи нелинейного элемента позволяет определить амплитуду и фазовый сдвиг первой гармоники (2.19) на выходе нелинейного элемента при гармоническом воздействии (2.18) на его входе, т.е.
a н 1 = a ´A Э (w, a ); y н 1 = y Э (w, a ).
Исследование симметричных периодических режимов в нелинейных системах. При исследовании нелинейных систем на основе метода гармонической линеаризации в первую очередь решают вопрос о существовании и устойчивости периодических режимов. Если периодический режим устойчив, то в системе существуют автоколебания с частотой w 0 и амплитудой a 0 .
Рассмотрим нелинейную систему (рис. 2.5), включающую в себя линейную часть с передаточной функцией
и нелинейный элемент с эквивалентным комплексным коэффициентом передачи
W Э (jw, a ) = q(w, a ) + jq¢(w, a ) = A Э (w, a ) e j y э (w , a ) . (2.24)
Принимая во внимание выражение (2.21), можно записать уравнение нелинейной системы
{A(p) + B(p)´}x = 0. (2.25)
Если в замкнутой нелинейной системе возникают автоколебания
x = a 0 sin w 0 t
с постоянной амплитудой и частотой, то коэффициенты гармонической линеаризации оказываются постоянными, а вся система стационарной. Для оценки возможности возникновения автоколебаний в нелинейной системе методом гармонической линеаризации необходимо найти условия границы устойчивости, как это делалась при анализе устойчивости линейных систем. Периодическое решение существует, если при a = a 0 и w = w 0 характеристическое уравнение гармонически линеаризованной системы
A(p) + B(p)´ = 0 (2.26)
имеет пару мнимых корней l i = jw 0 и l i +1 = -jw 0 . Устойчивость решения необходимо оценить дополнительно.
В зависимости от методов решения характеристического уравнения различают методы исследования нелинейных систем.
Аналитический метод . Для оценки возможности возникновения в нелинейной системе автоколебаний в гармонически линеаризованный характеристический полином системы вместо p подставляют jw
D(jw, a ) = A(jw) + B(jw)´. (2.27)
В результате получают уравнение D(jw, a ) = 0, коэффициенты которого зависят от амплитуды и частоты предполагаемого автоколебательного режима. Выделив вещественную и мнимую части
Re D(jw, a ) = X(w, a );
Im D(jw, a ) = Y(w, a ),
получим уравнение
X(w, a ) + jY(w, a ) = 0. (2.28)
Если при действительных значениях a 0 и w 0 выражение (2.28) удовлетворяется, то в системе возможен автоколебательный режим, параметры которого рассчитываются по следующей системе уравнений:
Из выражений (2.29) можно найти зависимость амплитуды и частоты автоколебаний от параметров системы, например, от коэффициента передачи k линейной части системы. Для этого необходимо в уравнениях (2.29) коэффициент передачи k считать переменной величиной, т.е. эти уравнения записать в виде:
По графикам a 0 = f(k), w 0 = f(k) можно выбрать коэффициент передачи k, при котором амплитуда и частота возможных автоколебаний имеет допустимые значения или вообще отсутствует.
Частотный метод . В соответствии с критерием устойчивости Найквиста незатухающие колебания в линейной системе возникают в том случае, когда амплитудно-фазовая характеристика разомкнутой системы проходит через точку с координатами [-1, j0]. Данное условие является также условием существования автоколебаний в гармонически линеаризованный нелинейной системе, т.е.
W н (jw, a ) = -1. (2.31)
Так как линейная и нелинейная части системы соединены последовательно, то частотная характеристика разомкнутой нелинейной системы имеет вид
W н (jw, a ) = W лч (jw)´W Э (jw, a ). (2.32)
Тогда в случае статической характеристики нелинейного элемента условие (2.31) принимает вид
W лч (jw) = - . (2.33)
Решение уравнения (2.33) относительно частоты и амплитуды автоколебаний можно получить графически как точку пересечения годографа частотной характеристики линейной части системы W лч (jw) и годографа обратной характеристики нелинейной части , взятой с обратным знаком (рис. 2.11). Если эти годографы не пересекаются, то режим автоколебаний в исследуемой системе не существует.
Рис. 2.11. Годографы линейной и нелинейной частей системы
Для устойчивости автоколебательного режима с частотой w 0 и амплитудой a 0 требуется, чтобы точка на годографе нелинейной части - , соответствующая увеличенной амплитуде a 0 +Da по сравнению со значением в точке пересечения годографов, не охватывалась годографом частотной характеристики линейной части системы и охватывалась точка, соответствующая уменьшенной амплитуде a 0 -Da .
На рис. 2.11 дан пример расположения годографов для случая, когда в нелинейной системе существуют устойчивые автоколебания, так как a 3 < a 0 < a 4 .
Исследование по логарифмическим частотным характеристикам .
При исследовании нелинейных систем по логарифмическим частотным характеристикам условие (2.31) переписывают отдельно для модуля и аргумента эквивалентного комплексного коэффициента передачи разомкнутой нелинейной системы
mod W лч (jw)W э (jw, a ) = 1;
arg W лч (jw)W э (jw, a ) = - (2k+1)p, при k=0, 1, 2, ...
с последующим переходом к логарифмическим амплитудной и фазовой характеристикам
L лч (w) + L э (w, a ) = 0; (2.34)
y лч (w) + y э (w, a ) = - (2k+1)p, при k=0, 1, 2, ... (2.35)
Условия (2.34) и (2.35) позволяют определить амплитуду a 0 и частоту w 0 периодического решения уравнения (2.25) по логарифмическим характеристикам линейной части системы L лч (w), y лч (w) и нелинейного элемента L э (w, a ), y э (w, a ).
Автоколебания с частотой w 0 и амплитудой a 0 будут существовать в нелинейной системе, если периодическое решение уравнения (2.25) устойчиво. Приближенный метод исследования устойчивости периодического решения заключается в том, что исследуется поведение системы при частоте w = w 0 и значениях амплитуды a = a 0 + Da и a = a 0 - Da , где Da > 0 - малое приращение амплитуды. При исследовании устойчивости периодического решения при a 0 + Da и a 0 - Da по логарифмическим характеристикам пользуются критерием устойчивости Найквиста.
В нелинейных системах с однозначными статическими характеристиками нелинейного элемента коэффициент гармонической линеаризации q¢(a ) равен нулю, а следовательно, равен нулю и фазовый сдвиг y э (a ), вносимый элементом. В этом случае периодическое решение уравнения системы
x = 0 (2.36)
существует, если выполняются условия:
L лч (w) = - L э (a ); (2.37)
y лч (w) = - (2k+1)p, при k=0, 1, 2, ... (2.38)
Уравнение (2.38) позволяет определить частоту w = w 0 периодического решения, а уравнение (2.37) - его амплитуду a = a 0 .
При сравнительно простой линейной части решения этих уравнений могут быть получены аналитически. Однако в большинстве случаев их целесообразно решать графически (рис. 2.12).
При исследовании устойчивости периодического решения уравнения (2.36), т.е. при определении существования автоколебаний в нелинейной системе с однозначной нелинейной статической характеристикой пользуются критерием Найквиста : периодическое решение с частотой w = w 0 и амплитудой a = a 0 устойчиво, если при изменении частоты от нуля до бесконечности и положительном приращении амплитуды Da > 0 разность между числом положительных (сверху вниз) и отрицательных (снизу вверх) переходов фазовой характеристики линейной части системы y лч (w) через линию -p равна нулю в диапазоне частот, где L лч (w)³-L э (w 0 ,a 0 +Da ), и не равна нулю в диапазоне частот, где L лч (w)³-L э (w 0 ,a 0 -Da ).
На рис. 2.12 показан пример определения периодических решений в нелинейной системе с ограничением. В такой системе имеются три периодических решения с частотами w 01 , w 02 и w 03 , определяемыми в точках пересечения фазовой характеристики y лч (w) с линией -180 0 . Амплитуды периодического решения a 01 , a 02 и a 03 определяются из условия (2.37) по логарифмическим амплитудным характеристикам нелинейного элемента -L э (w 01 , a ), -L э (w 02 , a ) и -L э (w 03 , a ).
Рис. 2.12. Логарифмические амплитудные и фазовая характеристики
Из трех решений, определенных на рис. 2.12, устойчивы два. Решение с частотой w = w 01 и амплитудой a = a 01 устойчиво, так как в диапазоне частот 1, где L лч (w)³-L э (w 01 ,a 01 +Da ), фазовая характеристика y лч (w) не пересекает линию -180 0 , а в диапазоне частот 2, где L лч (w)³-L э (w 01 ,a 01 -Da ), фазовая характеристика y лч (w) один раз пересекает линию -180 0 . Решение с частотой w = w 02 и амплитудой a = a 02 неустойчиво, так как в диапазоне частот, где L лч (w)³-L э (w 02 ,a 02 +Da ), фазовая характеристика y лч (w) один раз пересекает линию -180 0 . Высокочастотное периодическое решение с частотой w = w 03 и амплитудой a = a 03 устойчиво, так как в диапазоне частот, где L лч (w)³-L э (w 03 ,a 03 +Da ), имеется один положительный и один отрицательный переход фазовой характеристики y лч (w) через линию -180 0 , а в диапазоне частот, где L лч (w)³-L э (w 03 ,a 03 -Da ), имеются два положительных и один отрицательный переход фазовой характеристики y лч (w) через линию -180 0 .
В рассмотренной системе при малых по величине возмущениях установятся высокочастотные автоколебания с частотой w 03 и амплитудой a 03 , а при больших по величине возмущениях - низкочастотные автоколебания с частотой w 01 и амплитудой a 01 .
Пример. Исследовать автоколебательные режимы в нелинейной системе, линейная часть которой имеет следующую передаточную функцию
где k=200 c -1 ; T 1 =1.5 c; T 2 =0.015 c,
а в качестве нелинейного элемента используется реле с зоной нечувствительности (рис. 2.4,б) при с=10 В, b=2 В.
Р е ш е н и е. По таблице для реле с зоной нечувствительности находим коэффициенты гармонической линеаризации:
При a ³ b, q¢(a ) = 0.
При построении характеристик нелинейного элемента целесообразно использовать относительное по сравнению с зоной нечувствительности значение амплитуды входного гармонического воздействия m = a /b. Перепишем выражение коэффициента гармонической линеаризации в виде
где - коэффициент передачи реле;
Относительная амплитуда.
Коэффициент передачи реле k н отнесем к линейной части системы и получим нормированные коэффициенты гармонической линеаризации
и нормированную логарифмическую амплитудную характеристику релейного элемента с обратным знаком
Если m ® 1, то -L э (m) ® ¥; а при m >> 1 -L э (m) = 20 lg m. Таким образом, асимптотами нормированной логарифмической амплитудной характеристики с обратным знаком являются вертикальная прямая и прямая с наклоном +20дб/дек, которые проходят через точку с координатами L = 0, m = 1 (рис. 2.13).
Рис. 2.13. Определение периодического решения в релейной системе
с зоной нечувствительности
a 0 = b´m 1 = = 58 В.
Для решения вопроса о существовании автоколебаний в соответствии с нормированной логарифмической амплитудной характеристикой с обратным знаком нелинейного элемента и передаточной функцией линейной части системы
на рис. 2.13 построены логарифмические характеристики L лч (w), -L э (m) и y лч (w).
Частота периодического решения w 0 = 4.3 c -1 определяется в точке пересечения фазовой характеристики y лч (w) и линии -180 0 . Амплитуды периодических решений m 1 = 29 и m 2 = 1.08 находятся по характеристикам L лч (w) и -L э (m). Периодическое решение с малой амплитудой m 2 неустойчиво, а периодическое решение с большой амплитудой m 1 устойчиво.
Таким образом, в исследуемой релейной системе существует автоколебательный режим с частотой w 0 = 4.3 c -1 и амплитудой a 0 = b´m 1 = = 58 В.
Зависимости
Обработка результатов косвенных измерений при нелинейной
Представление результатов измерений
Ввиду того, что каждый аргумент может иметь соответствующие доверительные границы неисключенной систематической и случайной погрешностей, то задача определения погрешности косвенного измерения в этих случаях делится на три этапа:
а) суммирование частных неисключенных систематических погрешностей аргументов;
б) суммирование частных случайных погрешностей аргументов;
в) сложение систематической и случайной составляющих погрешности.
Доверительная граница неисключенной систематической погрешности косвенного измерения при условии одинаковой доверительной вероятности частных погрешностей и их равномерного распределения внутри заданных границ определяется по формуле (без учета знака):
где θ y – доверительная граница неисключенной систематическо погрешности среднего значения X j -го аргумента. При отсутствии корреляционной связи между аргументами оценка СКО случайной погрешности косвенного измерения вычисляется по
где S x j – оценка СКО случайной погрешности результата измерения X j -го аргумента.
При нормальном распределении погрешностей косвенного измерения доверительная граница случайной составляющей погрешности вычисляется по формуле:
где t p – квантиль Стьюдента при доверительной вероятности P с эффективным числом степеней свободы k эф , определяемом при малых объемах выборки по формуле:
При больших объемах число степеней свободы находится по формуле
Доверительная граница суммарной погрешности результата косвенного
измерения определяется по правилам, изложенным выше.
Существуют два метода определения точечной оценки результата косвенного измерения и её погрешности: линеаризации и приведения.
Для косвенных измерений при нелинейных зависимостях и некоррелированных погрешностях измерений аргументов используется метод линеаризации. Метод линеаризации основан на том, что погрешность измерения значительно меньше измеряемой величины, и поэтому вблизи средних значений Xi аргументов нелинейная функциональная зависимость линеаризуется и раскладывается в ряд Тейлора (члены высокого порядка не учитываются). Линеаризуя функцию нескольких случайных аргументов (какими и являются результаты измерений и их погрешности), можно получить, как правило, достаточно простое выражение для вычисления оценок среднего
значения и среднего квадратического отклонения функции. Разложение нелинейной функции в ряд Тейлора имеет вид:
Метод линеаризации допустим, если можно пренебречь остаточным членом R . Остаточным членом
пренебрегают, если
где X S – среднее квадратическое отклонение случайных погрешностей результата измерения x i -го аргумента. Первое слагаемое правой части уравнения есть точечная оценка истинного значения косвенной величины, которая получается подстановкой в
функциональную зависимость средних арифметических X i , значений аргументов:
Второе слагаемое
есть сумма составляющих погрешности косвенного измерения, называемых частными погрешностями, а частные производные
Коэффициентами влияния.
Отклонения ΔXi должны быть взяты из полученных значений погрешностей и такими, чтобы они максимизировали выражение для остаточного члена R . Если частные погрешности косвенного измерения не зависят друг от друга, т. е. являются некоррелированными, и известны доверительные границы погрешности аргументов при одинаковой вероятности, то предельная погрешность (без учета знака) косвенного измерения вычисляется по формуле:
значения частных производных функциональной зависимости определяются при средних значениях аргументов
Этот метод, называемый максимум-минимум, дает значительно завышенное значение погрешности косвенного измерения. Относительно правильная оценка погрешности косвенного измерения, получается, по методу квадратического суммирования
В ряде случаев расчет погрешности косвенного измерения значительно упрощается при переходе к относительным погрешностям. Для этого используется прием логарифмирования и последующего дифференцирования функциональной зависимости. Когда предельная погрешность косвенного измерения, полученная по методу максимума-минимума.
Дифференциальные уравнения можно линеаризовать следующими методами:
1. нелинейная функция рабочей области раскладывается в ряд Тейлора.
2. Заданные в виде графов нелинейные функции линеаризуются в рабочей плоскости прямыми.
3. Вместо непосредственного определения частных производных, вводятся переменные в исходные нелинейные уравнения.
 ,
,
 .
(33)
.
(33)
4. Данный метод основан на определении коэффициентов по методу наименьших квадратов.
 ,
(34)
,
(34)
где
 - постоянное времени пневмопривода;
- постоянное времени пневмопривода;
 - передаточный
коэффициент пневмопривода;
- передаточный
коэффициент пневмопривода;
 - коэффициент
демпфирования пневмопривода.
- коэффициент
демпфирования пневмопривода.
Внутреннее строение элементов САР наиболее просто определяется с помощью структурных схем графов. В отличие от известных структурных схем в графах, переменные указываются в виде времени, а дуги обозначают или параметры, или передаточные функции типовых звеньев. Между ними существует четное соотношение.
![]()
![]()
![]()
![]()
![]()


Мм нелинейных элементов
Рассмотренные в первой главе методы линеаризации применимы, когда нелинейность, входящая в объект ЛСА, хотя бы один раз дифференцируема или аппроксимируется касательной с малой погрешностью некоторой окрестности близкой к рабочей точке. Существует целый класс нелинейностей, для которых оба условия не выполняются. Обычно это существенные нелинейности. К ним относятся: ступенчатые, кусочно-линейные и многозначные функции с точками разрыва первого рода, а также степенные и транстендентые функции. Использование УВМ, обеспечивающих выполнение логико-алгебраических операций в системах привело к новым типам линейностей, которые представляют через непрерывные переменные с помощью специальной логики.
Для математического описания таких нелинейностей применяют эквивалентные передаточные функции, зависящие от коэффициентов линеаризации, которые получают путем минимизации среднего квадрата ошибки воспроизведения заданного входного сигнала. Форма входных сигналов, поступающих на вход нелинейностей может быть произвольна. На практике наиболее распространение получили гармонические и случайные виды входных сигналов и их временные комбинации. Соответственно и методы линеаризации называются гармоническими и статическими.
Общий метод описания эквивалентных передаточных функций нэ
Весь класс
существенных нелинейностей разделены
на две группы. К первой группе относится
однозначные нелинейности, у которых
связь между входными
 и выходными
и выходными векторными сигналами зависит только
от формы статической характеристики
нелинейности
векторными сигналами зависит только
от формы статической характеристики
нелинейности .
.
 .
.

В этом случае, при определенной форме входных сигналов:
 .
.
С помощью матрицы
линеаризации
 можно найти приближенное значение
выходных сигналов:
можно найти приближенное значение
выходных сигналов:
 .
.
Из (42) следует, что матрица коэффициентов линеаризации однозначных нелинейностей, является действительными величинами и их эквивалентные передаточные функции:
 .
.
Ко второй группе относят двузначные (многозначные) нелинейности, у которых связь между входными и выходными сигналами зависит не только от формы статической характеристики, но так же определяется предысторией входного сигнала. В этом случае выражение (42) запишется в виде:

 .
.
Для учета влияния
предыстории входного периодического
сигнала будем учитывать не только сам
сигнал
 ,
но и скорость его изменения, дифференциал
,
но и скорость его изменения, дифференциал .
.
При входных сигналах:
 приближенное
значение входного сигнала будет:
приближенное
значение входного сигнала будет:
где
 и
и - коэффициенты гармонической линеаризации
двухзначных нелинейностей;
- коэффициенты гармонической линеаризации
двухзначных нелинейностей;
 - период колебания
по правой гармонике;
- период колебания
по правой гармонике;
 - гармоническая
функция.
- гармоническая
функция.
Эквивалентная передаточная функция:
Существуют нелинейности более общего вида:
 ,
,
 ,
,
где
 и
и - коэффициенты гармонической линеаризации;
- коэффициенты гармонической линеаризации;
 - номер гармоники.
- номер гармоники.
Матрицы коэффициентов
линеаризации периодической с периодом
 .
Имея это ввиду, передаточную функцию
двух двухзначной нелинейности можно
представить по аналогии с передаточной
функцией
.
Имея это ввиду, передаточную функцию
двух двухзначной нелинейности можно
представить по аналогии с передаточной
функцией
Пользуясь определим обобщенную формулу для вычисления передаточной функции однозначных и двухзначных нелинейностей.
В случае однозначной
нелинейности матрица коэффициентов
линеаризации
 ,
зависящей от параметров вектора
,
зависящей от параметров вектора ,
выберем, таким образом, чтобы линеаризовать
среднее значение квадрата разности
между точным
,
выберем, таким образом, чтобы линеаризовать
среднее значение квадрата разности
между точным и приближенным
и приближенным сигналами на входе:
сигналами на входе:
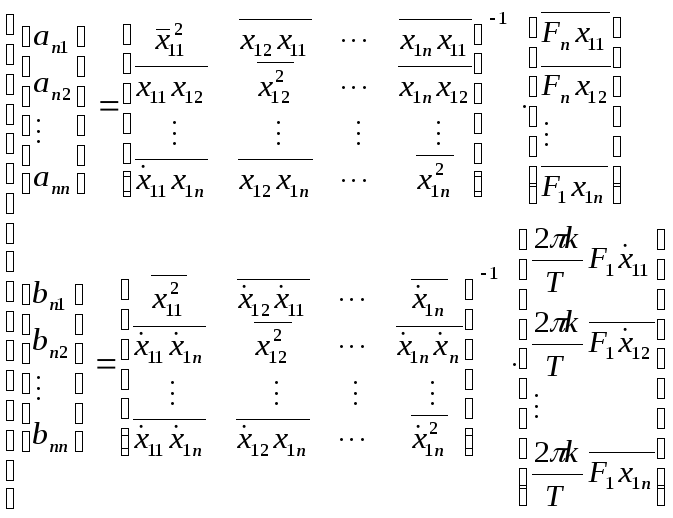
После преобразований,
упрощений, ухищрений и усиления
бдительности, получим эквивалентную
передаточную функцию в виде системы
матриц:
 ,
, .
.
 ,
,
при
 ,
, .
.
 .
.
Определить коэффициент линеаризации для однозначной нелинейности. Когда на ее вход поступает первая гармоника синусоидального сигнала:
где
 .
.
 .
.
Уравнение (56)
представляет собой коэффициент
линеаризации по первой гармонике для
однозначной нелинейности, она определяет
эквивалентную передаточную функцию
 .
.
В дальнейшем сравнение формулы для определения коэффициентов линеаризации простейших нелинейностей при подаче на их вход периодических сигналов: синусоидального, треугольного, покажем целесообразность применения получаемых эквивалентных передаточных функций.
Коэффициент
линеаризации определим
 ,
, .
.
 ,
,
 .
.
Пример. Определить коэффициент линеаризации двузначной нелинейности, когда на ее вход поступает первая гармоника синусоидального сигнала и имеет один вход. Из системы матриц (60), получим:
 ,
,
 .
.
В данном примере входной сигнал запишем в виде:
 ,
,
 .
.
Когда для двузначной нелинейности общая эквивалентная функция:
 .
.
.
.
Правила ввода функций:
- Все переменные выражаются через x 1 ,x 2
- Все математические операции выражаются через общепринятые символы (+,-,*,/,^). Например, x 1 2 +x 1 x 2 , записываем как x1^2+x1*x2 .
Все рассматриваемые ниже методы основываются на разложении нелинейной функции общего вида f(x) в ряд Тейлора до членов первого порядка в окрестности некоторой точки x 0:
где ![]() – отбрасываемый член второго порядка малости.
– отбрасываемый член второго порядка малости.
Таким образом, функция f(x) аппроксимируется в точке x 0 линейной функцией:
,
где x 0 – точка линеаризации.
Замечание
. Линеаризацию следует использовать с большой осторожностью, поскольку иногда она дает весьма грубое приближение.
Общая задача нелинейного программирования
Рассмотрим общую задачу нелинейного программирования:
Пусть x t – некоторая заданная оценка решения. Использование непосредственной линеаризации приводит к следующей задаче:

Эта задача представляет собой ЗЛП. Решая ее, находим новое приближение x t +1 , которое может и не принадлежать допустимой области решений S.
Если , то оптимальное значение линеаризованной целевой функции, удовлетворяющее неравенству:
может не быть точной оценкой истинного значения оптимума.
Для сходимости к экстремуму достаточно, чтобы для последовательности точек { x t }, полученных в результате решения последовательности подзадач ЛП, выполнялось следующее условие:
значение целевой функции и невязки по ограничениям в точке x t +1 должно быть меньше их значений в точке x t .
Пример №1
.

Построим допустимую область S (см. рис.).

Допустимая область S состоит из точек кривой h(x)=0, лежащей между точкой (2;0), определяемой ограничением x 2 ≥0, и точкой (1;1), определяемой ограничением g(x) ≥0.
В результате линеаризации задачи в точке x 0 =(2;1) получаем следующую ЗЛП:

Здесь представляет собой отрезок прямой , ограниченный точками (2.5; 0.25) и (11/9; 8/9). Линии уровня линеаризованной целевой функции представляют собой прямые с наклоном -2, тогда как линии уровня исходной целевой функции – окружности с центром в точке (0;0). Ясно, что решением линеаризованной задачи является точка x 1 =(11/9; 8/9). В этой точке имеем:

так что ограничение–равенство нарушается. Произведя новую линеаризацию в точке x 1 , получаем новую задачу:

Новое решение лежит на пересечении прямых ![]() и и имеет координаты x 2 =(1.0187; 0.9965). Ограничение– равенство (
и и имеет координаты x 2 =(1.0187; 0.9965). Ограничение– равенство (![]() ) все еще нарушается, но уже в меньшей степени. Если произвести еще две итерации, то получим очень хорошее приближение к решению x * =(1;1), f(x *)=2
) все еще нарушается, но уже в меньшей степени. Если произвести еще две итерации, то получим очень хорошее приближение к решению x * =(1;1), f(x *)=2
Таблицa - Значения целевой функции для некоторых итераций:
| Итерация | f | g | h |
| 0 | 5 | 3 | –1 |
| 1 | 2,284 | 0,605 | –0,0123 |
| 3 | 2,00015 | 3,44×10 -4 | –1,18×10 -5 |
| Оптимум | 2 | 0 | 0 |
Из таблицы видно, что значения f,g и h монотонно улучшаются. Однако такая монотонность характерна для задач, функции которых являются "умеренно" нелинейными. В случае функций с ярко выраженной нелинейностью монотонность улучшения нарушается и алгоритм перестает сходиться.
Существует три способа усовершенствования методов непосредственной линеаризации:
1. Использование линейного приближения для отыскания направления спуска.
2. Глобальная аппроксимация нелинейной функции задачи при помощи кусочно–линейчатой функции.
3. Применение последовательных линеаризаций на каждой итерации для уточнения допустимой области S.
Большинство реальных систем нелинейны, т.е. поведение системы описывается уравнениями:
Часто на практике нелинейные системы можно аппроксимировать линейной в некоторой ограниченной области.
Предположим,
что
 для уравнения (1) известно. Заменим
систему (1,2) подставив начальные условия
для уравнения (1) известно. Заменим
систему (1,2) подставив начальные условия

Предполагаем,
что начальные состояния и входная
переменная
 изменены так, что новое состояние и
входная переменная
изменены так, что новое состояние и
входная переменная
 имеет
следующий вид.
имеет
следующий вид.

Выход
 найдем в результате решения возмущенных
уравнений.
найдем в результате решения возмущенных
уравнений.

Разложим правую часть в ряд Тейлора.
 -остаточный
член погрешности второго порядка
малости.
-остаточный
член погрешности второго порядка
малости.
Вычитая исходное решение из разложений, получаем следующие линеаризованные уравнения:

 .
.
Частные производные обозначим как коэффициенты зависящие от времени
Эти выражения можно переписать в виде


Получим
линеаризованные уравнения в точках
равновесия .
.
 .
В точке
.
В точке
Решение этого уравнения

Продифференцируем правую часть исходного уравнения по x , получим
 .
.
Выполним
линеаризацию уравнения для произвольного
начального значения .
.
Получаем линеаризованную систему в виде нестационарного уравнения
Решение линеаризованной системы имеет вид:
 .
.
1.7. Типовые возмущающие воздействия
Внешние возмущающие воздействия могут иметь различный характер:
мгновенного действия виде импульса и постоянного действия.
Если
продифференцировать во времени
 , то
, то , следовательно(t)-
функция представляет собой производную
во времени единичного ступенчатого
воздействия.
, следовательно(t)-
функция представляет собой производную
во времени единичного ступенчатого
воздействия.
(t)- функция при интегрировании обладает следующими фильтрующими свойствами:
Интегрируемое
произведение произвольной функции
 и(t)-
функции отфильтровывает из всех значений
и(t)-
функции отфильтровывает из всех значений
 только то, которое соответствует моменту
приложение мгновенного единичного
импульса.
только то, которое соответствует моменту
приложение мгновенного единичного
импульса.
|
Линейное возмущение |
Гармоническое возмущение
|

2 U. Системы второго порядка
2.1.Приведение уравнений второго порядка к системам уравнений первого порядка
Пример линейной стационарной системы.
Другое описание этой же системы второго порядка дается парой связанных дифференциальных уравнений первого порядка
 (2)
(2)
где связь между коэффициентами этих уравнений определяется следующими соотношениями

2.2. Решение уравнений второго порядка
Применяя
дифференциальный оператор
 уравнение можно представить в более
компактном виде
уравнение можно представить в более
компактном виде
Решается уравнение (1) в 3 этапа:
1)
находим общее решение
 однородного
уравнения;
однородного
уравнения;
2)
находим частное решение
 ;
;
3)
полное решение есть сумма этих двух
решений
 .
.
Рассматриваем однородное уравнение
будем искать решение в форме
 (5)
(5)
где
 действительная
или комплексная величина. При подстановке
(5) в (4) получаем
действительная
или комплексная величина. При подстановке
(5) в (4) получаем
 (6)
(6)
Это выражение является решением однородного уравнения, если s удовлетворяет характеристическому уравнению
При s 1 s 2 решение однородного уравнения имеет вид
Тогда
ищем решение в виде
 и подставляя его в исходное уравнение
и подставляя его в исходное уравнение
Откуда
следует, что
 .
.
Если выбрать
 .
(8)
.
(8)
Частное
решение исходного уравнения (1) ищем
методом вариации
 в форме
в форме

исходя из (11), (13) получаем систему

Полное решение уравнения.


Заменой переменных получим уравнение второго порядка:

ФАЗОВАЯ ПЛОСКОСТЬ
Двумерным пространственным состоянием или фазовой плоскостью называется плоскость, в которой две переменные состояния рассматриваются в прямоугольной системе координат
 -
эти переменные состояния образуют
вектор
-
эти переменные состояния образуют
вектор
 .
.
График
изменения образует
траекторию движения. Необходимо указать
направление движения траектории.
образует
траекторию движения. Необходимо указать
направление движения траектории.
Состояние
равновесия называется такое состояние
 ,
в котором система остается при условии,
что
,
в котором система остается при условии,
что Состояние равновесия можно определить
(если оно существует) из соотношений
Состояние равновесия можно определить
(если оно существует) из соотношений
при любом t .
Состояния равновесия иногда называются критическими, основными или нулевыми точками.
Траектории системы не могут пересекаться друг с другом в пространстве, что вытекает и единственности решения дифференциального уравнения.
Ни
одна траектория не проходит через
состояние равновесия хотя и могут сколь
угодно близко приближаться к особым
точкам (при
 )
.
)
.
Типы точек
1 Регулярная точка есть любая точка, через которую может проходить траектория, точка равновесия не является регулярной.
2.Точка равновесия изолирована, если в ее малой окрестности содержатся только регулярные точки.
Рассмотрим систему

Для определения состояния равновесия решим следующую систему уравнений
 .
.
Получаем
зависимость между переменными состояния
 .
.
любая точка которой есть состояние равновесия. Эти точки не является изолированными.
Заметим, что для линейной стационарной системы

начальное
состояние оказывается состоянием
равновесия и изолированным, если
детерминант матрицы коэффициентов
 ,
тогда
,
тогда есть состояние равновесия.
есть состояние равновесия.
Для
нелинейной системы второго порядка
состояние равновесия
 называется
простым
,
если соответствующая матрица Якоби не
равна 0.
называется
простым
,
если соответствующая матрица Якоби не
равна 0.

В противном случае состояние не будет простым. Если точка равновесия является простой, то она изолирована. Обратное утверждение не обязательно верно (за исключением случая линейных стационарных систем) .
Рассмотрим
решение уравнения состояния для линейной
системи второго порядка:
 .
.
Эту систему можно представить двумя уравнениями первого порядка,
обозначим
 ,
,

Характеристическое
уравнение
 и решение будет следующим:
и решение будет следующим:

Решение уравнения записывается в виде









